Penn State is a PMI Authorized Training Partner (A.T.P.) and is committed to enhancing the ongoing professional development of PMI Members, PMI-certified Project Management Professionals, and other project management stakeholders.
Pennsylvania Sea Grant, Penn State Behrend and Erie Brewing Company will release a series of beers themed to promote awareness of aquatic invasive species, including hydrilla.
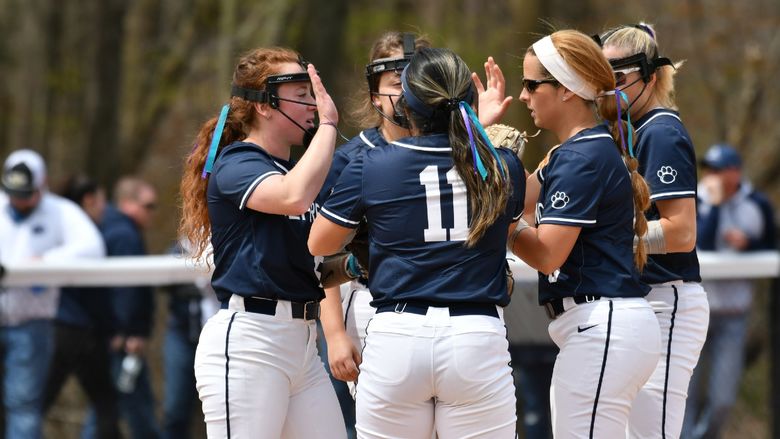
The Penn State Behrend softball team won the Allegheny Mountain Collegiate Conference regular-season title and will enter the conference championship with the No. 1 seed.